

Less than 10 years ago, a single axis gyroscope would have cost about 15-20$. Now, you can get a 3-axis gyro, 3-axis accelerometer, 3-axis magnetometer AND a barometer all on a single module for less than 30$! That’s exactly what the Pmod NAV is, a 9-axis IMU plus barometer on a single 0.8” by 1” (2 cm by 2.5 cm) module that conveniently plugs right into any Pmod connector with an SPI interface.
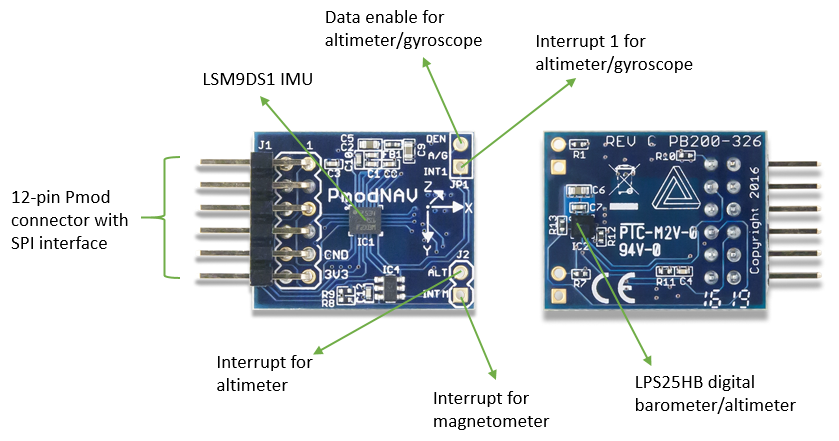
The Pmod NAV provides a complete navigation solution by combining the LSM9DS1 IMU (inertial measurement unit) with the LPS25HB digital barometer/altimeter. The LSM9DS1 features a 3-axis digital accelerometer, 3-axis digital gyroscope, 3-axis digital magnetic sensor, plus an embedded temperature sensor for improving the accuracy of readings. This system-in-package boasts 16-bit data output, smart power management, and comes factory calibrated (at 2.2 V).
The LPS25HB is a piezoresistive absolute pressure sensor that completes the Pmod NAV by adding the ability to gather barometric readings, turning the module into an altimeter in addition to a motion sensor. This IC features an embedded temperature sensor of its own for compensation, 24-bit data output, 260 to 1260 hPa absolute pressure range and low power consumption. For more detailed specs on the Pmod NAV, visit the reference manual.
Applications
With the combination of five different types of sensors packed on this board, the Pmod NAV is ideal for a wide variety of popular applications including robotics, navigation, gaming, virtual reality, gesture recognition, or really anything that requires knowledge of position in space! This one module alone can provide all the sensory data necessary to keep your UAV in the air and knowing where it’s going. Or, combined with the low power consumption feature, the Pmod NAV can provide display/map orientation for handheld and portable devices. By combining gyroscopic and accelerometer data and using an easy to implement technique such as a complimentary filter, very accurate angular position data can be achieved.
Getting Started with the Pmod NAV
If you are an MCU user, we’ve written some example code to get you started quickly. Examples include some basic accelerometer, gyro, magnetometer and altimeter functions plus calibration functions. Data will print out in useful units. See the Pmod NAV resource center to download.
If using the Pmod NAV with a Digilent FPGA board, see our wiki page titled Using Pmod IP’s for instructions on how to get up and running smoothly with MicroBlaze designs.
Questions or comments? Use the comment section below or visit the Digilent Forum!
Hi!
I tried PmodNAV with a cmodA7 board. I made a microblaze soft processor, and I downloaded the Pmod IP’s, I imported that and I followed this tutorial https://reference.blog.digilentinc.com/learn/programmable-logic/tutorials/pmod-ips/start. But unfortunately did not work. Can you help me what I need to do for getting gyroscope sensor values?
Thanks in advance
Hi Simon,
The best place for you to get help with the Pmod NAV for getting for gyrosscope and accelerometer values will be our technical Forum, https://forum.blog.digilentinc.com, where one of our applications engineers who are on there every weekday will be able to see and respond to your question! Those of us here on the blog won’t be able to help you out in the way you need.
Thanks!
James Colvin
I wanted to write…..Can you help me what I need to do for getting accelerometer values? 😉