

One of the most exciting things you can do with electronics besides blinking LEDs is make things move. What’s the most common way to make things move? Motors. If you’ve done much with motor control, you’ve probably heard of H-bridges. But what exactly is an H-bridge?
As it turns out, an H-bridge is a super simple circuit in theory:
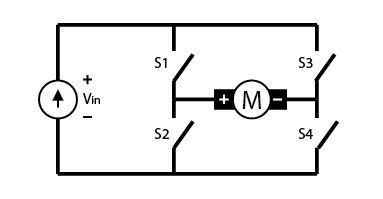
An H-bridge is built of four switches that control the flow of current to a load. In the image above, the load is the M connecting the two sets of switches. Using one current source, you can drive current in two directions by closing two switches.
If Switch 1 and 4 are closed, then the current will flow from the left to right on this image:
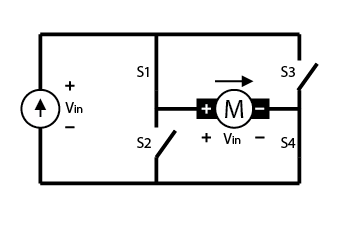
If you close switch 1 and switch 4, the current will flow from the source, through switch 1, and then through the load, then through switch 4, and then back to the load.
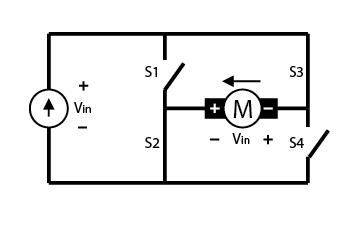
In the image above, the circuit has Switch 2 and switch 3 closed. This will cause the current to flow from the source, through switch 3, and then through the load, then through switch 2, then back to the load.
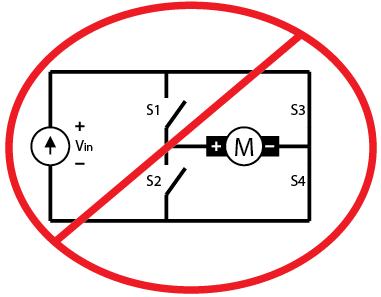
One thing you have to be very cautious about when working with H-bridges is to not create a short circuit. If you create a short circuit, that’s a sure way to burn out your H-bridge. I may have burned out my very first H-bridge at Digilent. Good thing I learned that lesson for all of you!
If you drive current and close two switches in series, for example, switch 3 and 4 in the image below, you will cause a short and burn out the H-bridge. As they say, don’t burn bridges!
So an H-bridge is just a way to control current direction with switches, but why is this useful?
The most typical application of an H-bridge circuit is motor control. Be warned, if you drive the motor and change direction at the same time, you will burn out the H-bridge circuit. Just remember where there’s direction and current, there’s H-bridges burnt.
Digilent offers 3 Peripheral Modules (Pmods) with H-bridge circuits for motor control. These include the Pmod HB5 for controlling 1 DC motor connected with a 6 pin connector, the Pmod HB3 for controlling 1 DC motor connected by screw terminals, and the Pmod DHB1 for controlling 2 DC motors or 1 stepper motor.
I need an H-bridge capable of handling very large currents in an electromagnet coil [EM], in order to switch its polarity: for example, 6 EMs in parallel each drawing 120 Amps from 12 V battery; total 720 A. So, power around 10 kW.
Any suggestions?