

I’m an intern at Digilent working on converting a dune buggy to electric power. This started out as a senior design project at Washington State University about three years ago, but was left unfinished by the graduating class. With access to Washington State University’s facilities, the project was revived starting this past February.
Once the buggy is complete, the operator will have the options to use either remote control or autonomous operation and will exemplify the functionality of Digilent products. The overall goal is to create something fun yet safe that will encourage innovators to go out and build something awesome.
Below are some of the recently completed sub-projects:
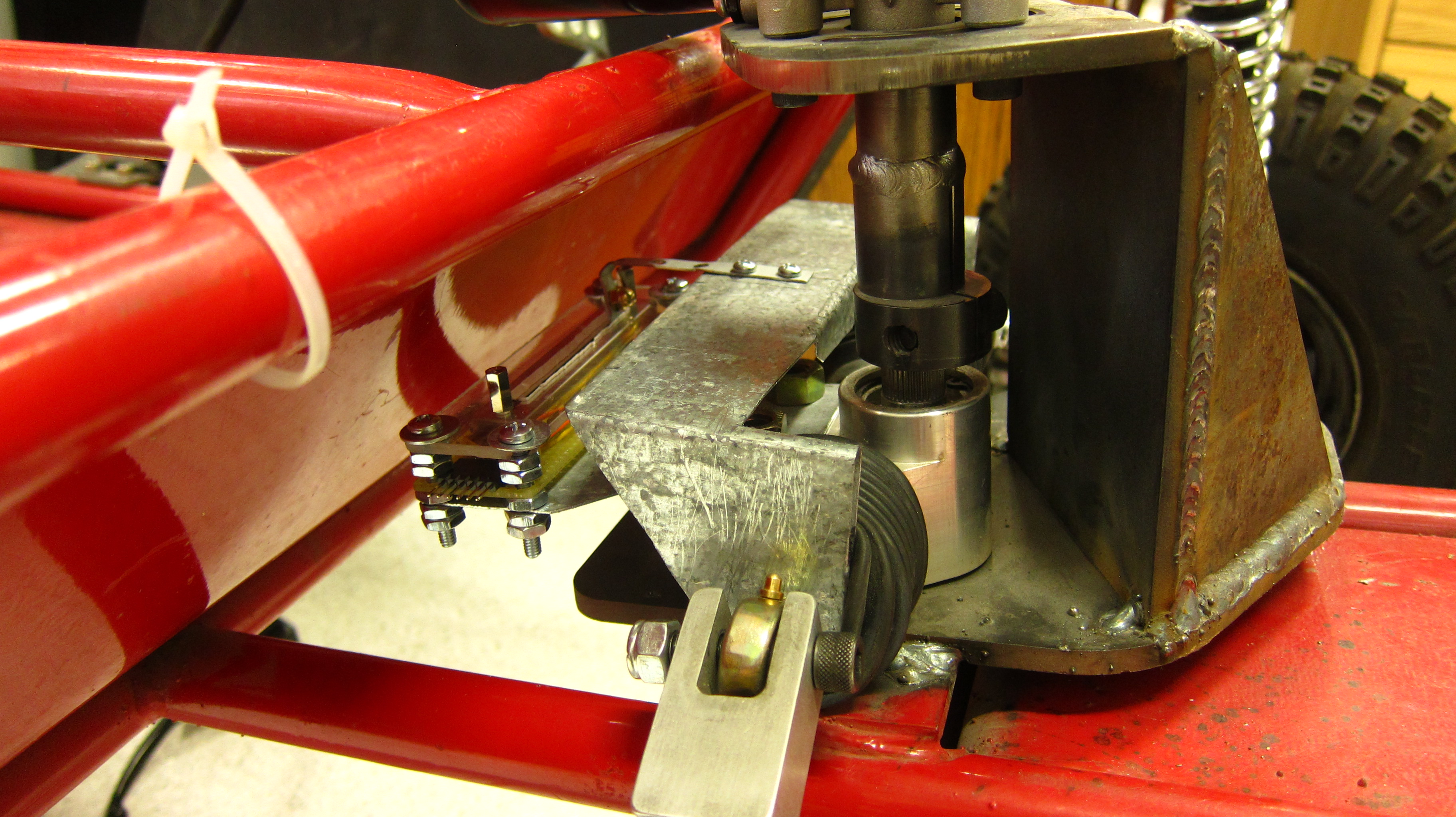
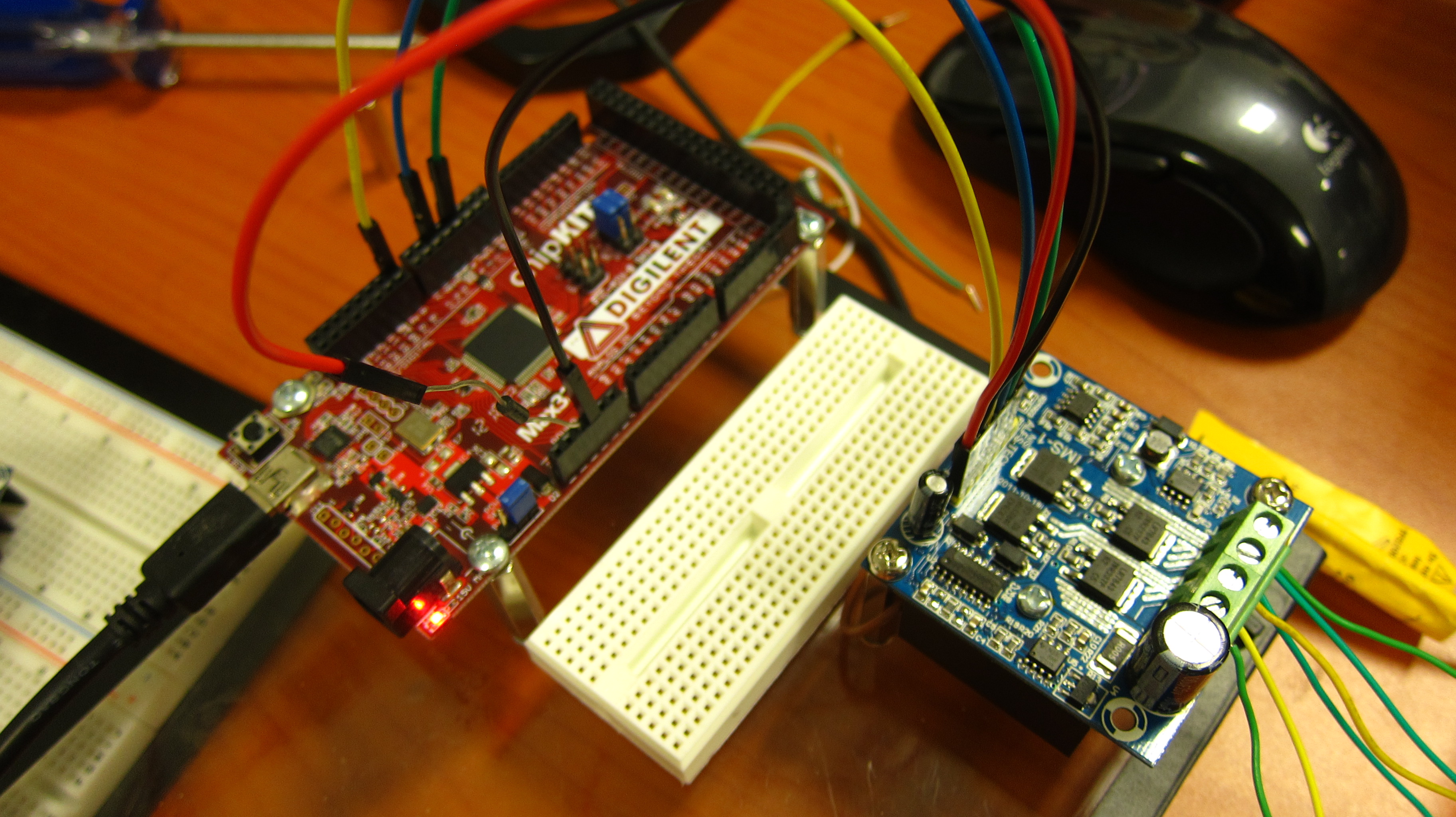
-Manual steering replaced by 18 N-m DC motor with accompanied H-bridge controlled by chipKIT Max32
-Added feedback resistor to rack and pinion to provide position control of steering via analog input
-Added Roboteq motor controller for drive motor (operable with RS-232 link from Max32)
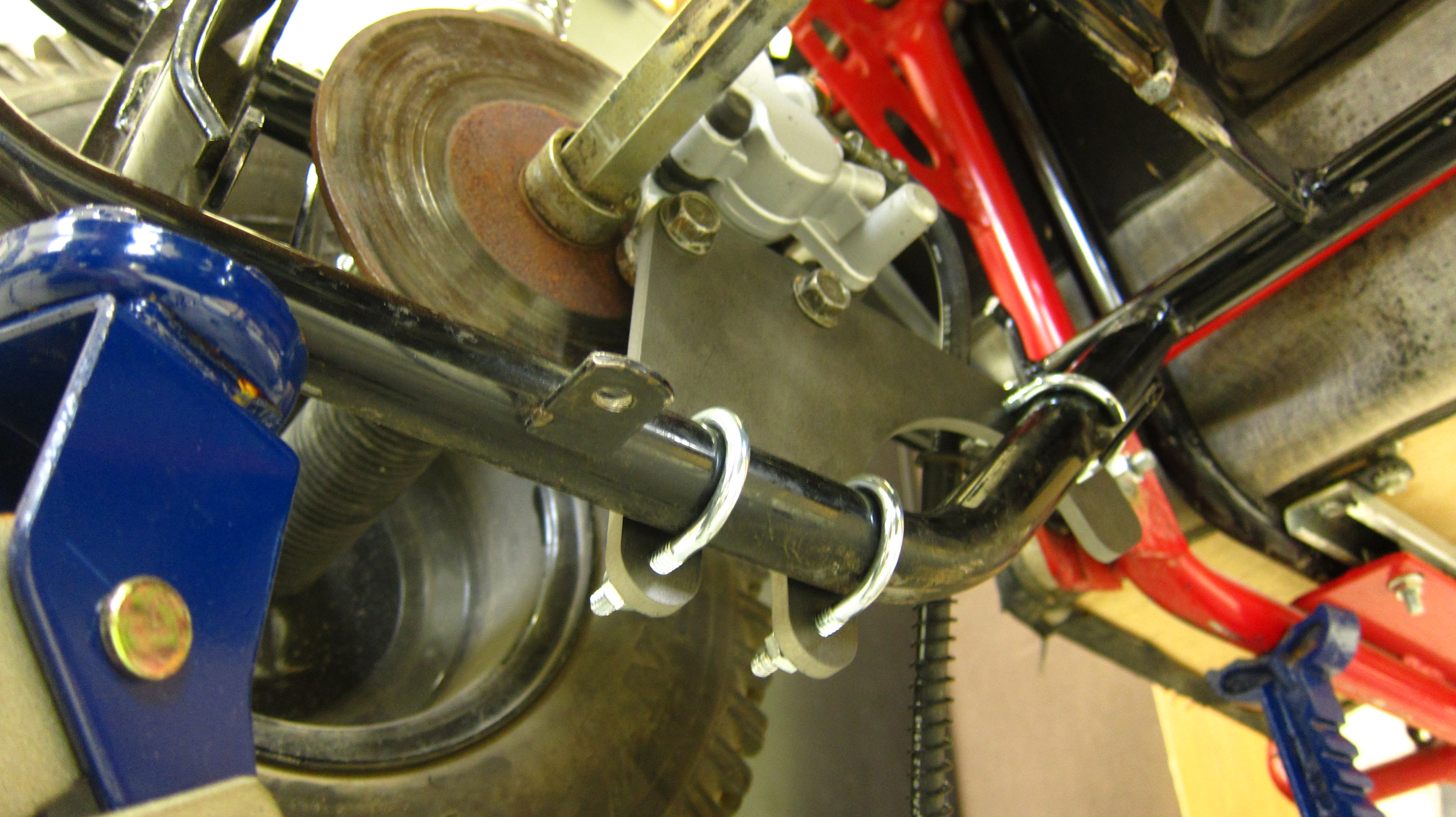
-Salvaged hydraulic brakes from a scooter for manual override of drive motor
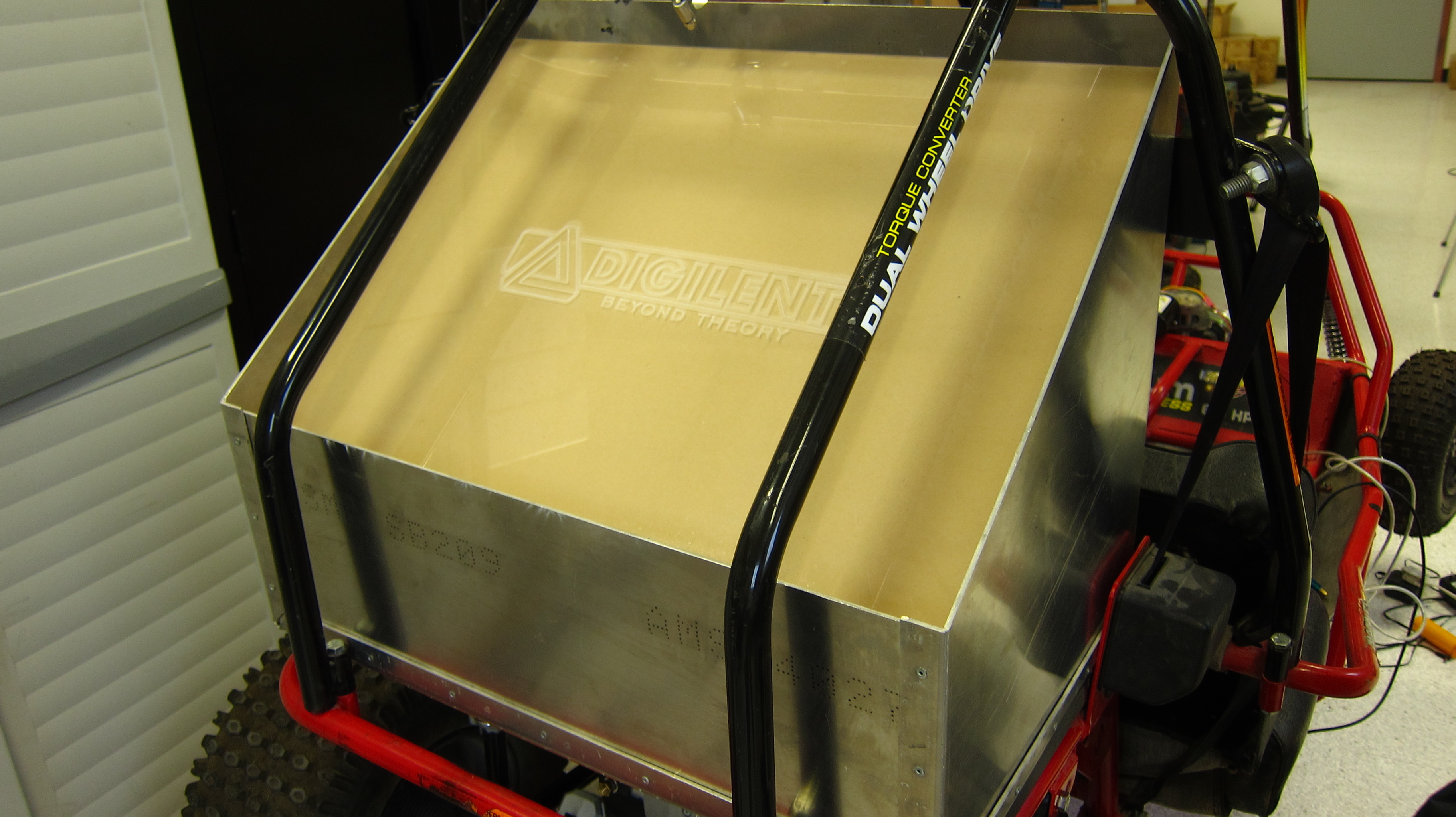
-Used Washington State University’s water jet to create brake mount, motor mount, and battery box pieces for assembly
-Replaced 6.5 horsepower gas motor to a 6 horsepower electric permanent magnet DC motor
-Created custom made battery box to house 131 amp-hours of batteries at 24V and all electrical components
Here are some images of some of the project!


Take a look at YouTube for a deeper overview of the components and operation.
Stay tuned for more updates…
Looks like you need some Brammo batteries!
-Self