Zybo Z7 Pcam 5C Demo

Description
The Zybo Z7 Pcam 5C project demonstrates the usage of the Pcam 5C as a video source by forwarding the streaming image data out to the HDMI TX port. The behavior is as follows:
- Video data streams in through the Pcam port and out through the HDMI source (TX) port.
- A UART interface is available to configure the image sensor and additional post processing IP Cores.
The following table lists the currently supported video resolutions and output formats from the image sensor. Note that resolutions with frame rates lower than 60Hz are over sampled to 60Hz to output over the HDMI port.
| Supported Resolutions: | Supported Image Sensor Output Formats | Supported OV5640 Image Processing Features | Image Processing Features Performed in FPGA |
|---|---|---|---|
| * 1080p@30Hz * 720p@60Hz | * RAW | * Auto White Balance * Defective Pixel Canceling * Auto Exposure Control (AEC) * Auto 50/60Hz Luminance Detection | * Demosaicing * Gamma Correction |
Inventory
- Zybo Z7 with a MicroUSB Programming Cable and External Power Supply
- 1 Pcam 5C Assembly
- Vivado and Vitis installations compatible with the latest release of this demo (2020.1)
- See Installing Vivado, Vitis, and Digilent Board Files for installation instructions.
- Serial Terminal application to receive messages printed by the demo
- See Installing and Using a Terminal Emulator for more information.
- 1 HDMI Type A to Type A or HDMI Type A to DVI-D cable
- HDMI or DVI monitor
Download and Usage Instructions
First and foremost, releases - consisting of a set of files for download - are only compatible with a specific version of the Xilinx tools, as specified in the name of the release (referred to as a release tag). In addition, releases are only compatible with the specified variant of the board. For example, a release tagged “20/DMA/2020.1” for the Zybo Z7 is only to be used with the -20 variant of the board and Xilinx tools (Vivado and Vitis) version 2020.1.
The latest release version for this demo is highlighted in green.
Note: Releases for FPGA demos from before 2020.1 used a different git structure, and used a different release tag naming scheme.
Note: The Pcam 5C demo is available for Zybo Z7-10 since the 2020.1 version.
| Board Variant | Release Tag | Release Downloads | Setup Instructions |
|---|---|---|---|
| Zybo Z7-10 | 10/Pcam-5C/2023.1-1 | Zybo-Z7-10-Pcam-5C-hw.xpr.zip Zybo-Z7-10-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-20 | 20/Pcam-5C/2023.1-1 | Zybo-Z7-20-Pcam-5C-hw.xpr.zip Zybo-Z7-20-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-10 | 10/Pcam-5C /2022.1-1 | Zybo-Z7-10-Pcam-5C-hw.xpr.zip Zybo-Z7-10-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-20 | 20/Pcam-5C/2022.1-1 | Zybo-Z7-20-Pcam-5C-hw.xpr.zip Zybo-Z7-20-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-10 | 10/Pcam-5C /2021.1-1 | Zybo-Z7-10-Pcam-5C-hw.xpr.zip Zybo-Z7-10-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-20 | 20/Pcam-5C/2021.1-1 | Zybo-Z7-20-Pcam-5C-hw.xpr.zip Zybo-Z7-20-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-10 | 10/Pcam-5C /2020.1-1 | Zybo-Z7-10-Pcam-5C-hw.xpr.zip Zybo-Z7-10-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-20 | 20/Pcam-5C /2020.1-1 | Zybo-Z7-20-Pcam-5C-hw.xpr.zip Zybo-Z7-20-Pcam-5C-sw.ide.zip | See Using the Latest Release, below |
| Zybo Z7-20 | v2019.1-1 | Release ZIP Downloads | v2019.1-1 README |
| Zybo Z7-20 | v2018.2-2 | Release ZIP Downloads | v2018.2-2 README |
| Zybo Z7-20 | v2017.4 | Release ZIP Downloads | Using Github Demo Projects (Legacy) |
| Zybo Z7-20 | v2016.4-1 | Release ZIP Downloads | Using Github Demo Projects (Legacy) |
Note for Advanced Users: GitHub sources for this demo can be found in the 10/Pcam-5C/master and 20/Pcam-5C/master branches of the Zybo-Z7 repository. Further documentation on the structure of this repository can be found on this wiki's Digilent FPGA Demo Git Repositories page.
Instructions on the use of the latest release can be found in this dropdown:
- Using the Latest Release
-
Note: This workflow is common across many Digilent FPGA demos. Screenshots may not match the demo you are working with.
Important: These steps are only to be used with releases for Xilinx tools versions 2020.1 and newer. Older releases may require other flows, as noted in the table of releases.
First, download the '*.xpr.zip' and '*.ide.zip' files from the demo release, linked above. The XPR archive contains the Vivado project used to build the hardware platform for this demo. The project can be opened, modified, and used to update the hardware platform later if so desired, but this is optional. The IDE archive contains a set of projects to be imported into a Vitis workspace.
Note: Unlike with Vivado XPR archives, do NOT extract the Vitis project archive ('*.ide.xip'). Vitis imports sources from the archive file directly.
- Import Vitis Projects from a Release
-
Select the dropdown corresponding to your operating system, below.
- Windows
-
Open Vitis through the start menu or desktop shortcut created during the installation process.

- Linux
-
Open a terminal and run the following commands. The install path is /opt/Xilinx by default.
source <install_path>/Vitis/2020.1/settings64.sh vitis
Note: Regardless of OS, if Vivado is open, Vitis can also be launched through the Tools → Launch Vitis toolbar option.
Upon launching Vitis, a dialog will appear where a workspace must be chosen. The workspace is the directory where all of the projects and files for the application being developed will live. If a folder that does not currently exist is chosen, it will be created. Choose a workspace and click Launch to finish launching Vitis.

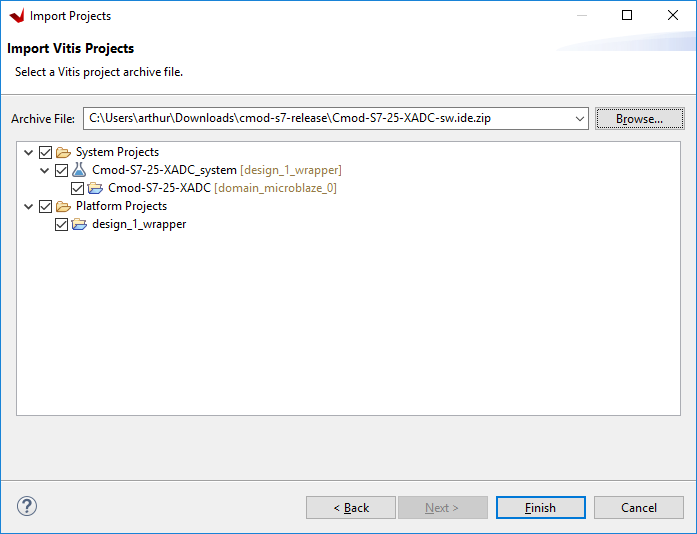
With Vitis open, click the Import Project button to import projects from a Vitis project exported zip file, then navigate to and select the IDE zip file you downloaded.

Make sure each project in the archive is checked, then click Finish to import them into your workspace.
- Build a Vitis Application
-
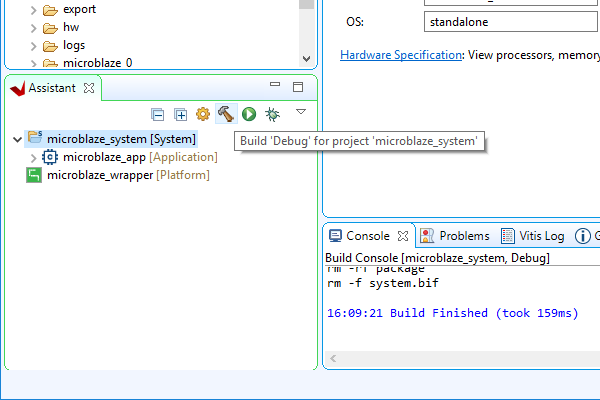
Once an application project has been set up and includes all necessary sources, it should be built. To build the project and all of its dependencies, select the [System] project in the Assistant pane, and either click the Build button (
 ), or press Ctrl-B on your keyboard.
), or press Ctrl-B on your keyboard.
Note: There are three types of build targets in the Assistant pane, Platforms, Systems, and Applications. Building the application will not trigger any other applications in the system to be built, but will build the wrapper as a dependency. Building the platform will only build the platform, as it has no dependencies. Building the system causes each application in the system, as well as the platform, to be built.
This process may take several minutes to complete. When done, the Console tab at the bottom of the window will display a “Build Finished” message.
- Set up the Zybo Z7
-
Plug one end of the HDMI cable into the HDMI TX port of the Zybo Z7 and the other into your HDMI monitor. Also attach a USB micro cable between the Zybo Z7 and your computer. Finally, attach an external 5V power supply, since the power demand surpasses the USB power budget.

Attach the Pcam 5C assembly (which includes the Pcam 5C and the attached 15-pin flat flexible cable) by inserting the other end of the FFC into the Pcam connector on the Zybo Z7 as shown in image below. Ensure the cable is securely latched by pressing down firmly on the connector with two fingers. For a more detailed set of instructions, see the Pcam section in the Zybo Z7 Reference Manual. If the cable has become disconnected from the Pcam 5C, please see the Pcam 5C reference manual for instructions on how to reattach it.

- Launch a Vitis Application
-
Make sure your board is set to boot from JTAG before it's powered on. JTAG programming can override other boot modes on some devices, but it's easier to tell when a project is programmed into the board if there isn't already one in there.
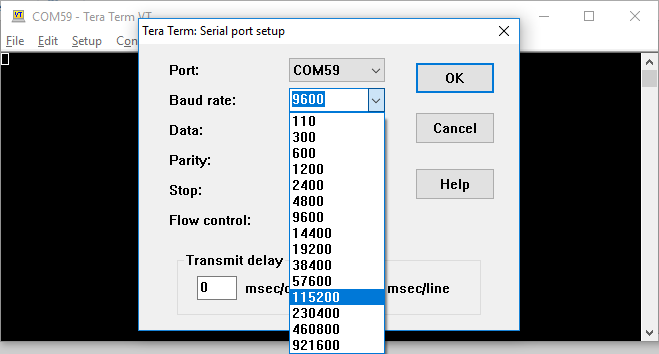
First, many applications require that a serial console is connected to the board, so that standard output (from print statements) can be viewed. For this purpose, a serial terminal should be used. Use a serial terminal application to connect to the board's serial port. Unless otherwise stated, Zynq designs use a baud rate of 115200 and Microblaze designs with an AXI UART Lite IP use a baud rate of 9600. Flow control should be set to NONE.
Note: While Vitis has a built in serial terminal included in its Debug view, it sends characters to a board on a line-by-line basis. Some software examples require the use of character-by-character reception of data. Tera Term or PuTTY are recommended if you are not sure what will work.
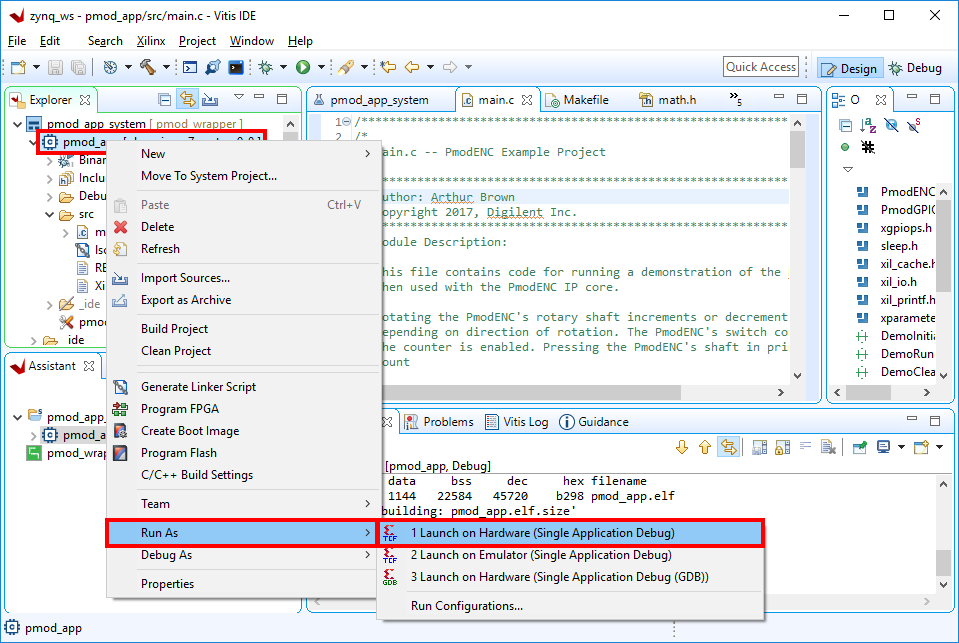
In the Explorer pane at the left side of the screen, right click on the application or system project that is to be run, and select Run as → 1 Launch on Hardware (Single Application Debug). The FPGA will be programmed with the bitstream, the ELF file created by the software build is loaded into system memory, and the application project will begin to run. You will need to click back over to the Vitis Serial Terminal from the Console tab.
Note: Once the project has been run at least once, you can use the green run button (
 ) in the toolbar at the top of the screen to program the board instead.
) in the toolbar at the top of the screen to program the board instead.
At this point, the demo is now running on your board. Refer to the Description section of this document for more information on what it does.
Additional steps beyond here present how you can use the other archive provided in the release, containing the hardware project, to rebuild the Vivado project, and use a newly exported XSA file to update the platform in Vitis.
In order to modify and switch out the hardware platform for a baremetal demo, you should first open the Vivado project from the release. Extract the previously downloaded '*.xpr.zip' file.
- Open a Block Design Project in Vivado
-
Launch Vivado
Select the dropdown corresponding to your operating system, below.
- Windows
-
Open Vivado through the start menu or desktop shortcut created during the installation process.

- Linux
-
Open a terminal, and change directory (cd) to a folder where log files for your Vivado session can be placed, then run the following commands:
source <install_path>/Vivado/<version>/settings64.sh vivado
In Vivado's welcome screen, use the Open Project button to navigate to and open the XPR file contained in the folder the release was extracted into.
The project's block diagram, which contains the design, with all of the existing components and their connections, can be opened by either double-clicking on the “*.bd” file in the sources pane (which also includes other source files, such as constraints), or by clicking the Open Block Design button in the Flow Navigator pane.
Making changes to the design is out of the scope of this particular document. More information on how to use IP Integrator to create or modify a project can be found through Getting Started with Vivado and Vitis for Baremetal Software Projects. The remainder of this document will discuss how to generate a bitstream, export a new hardware platform, and load it into Vitis.
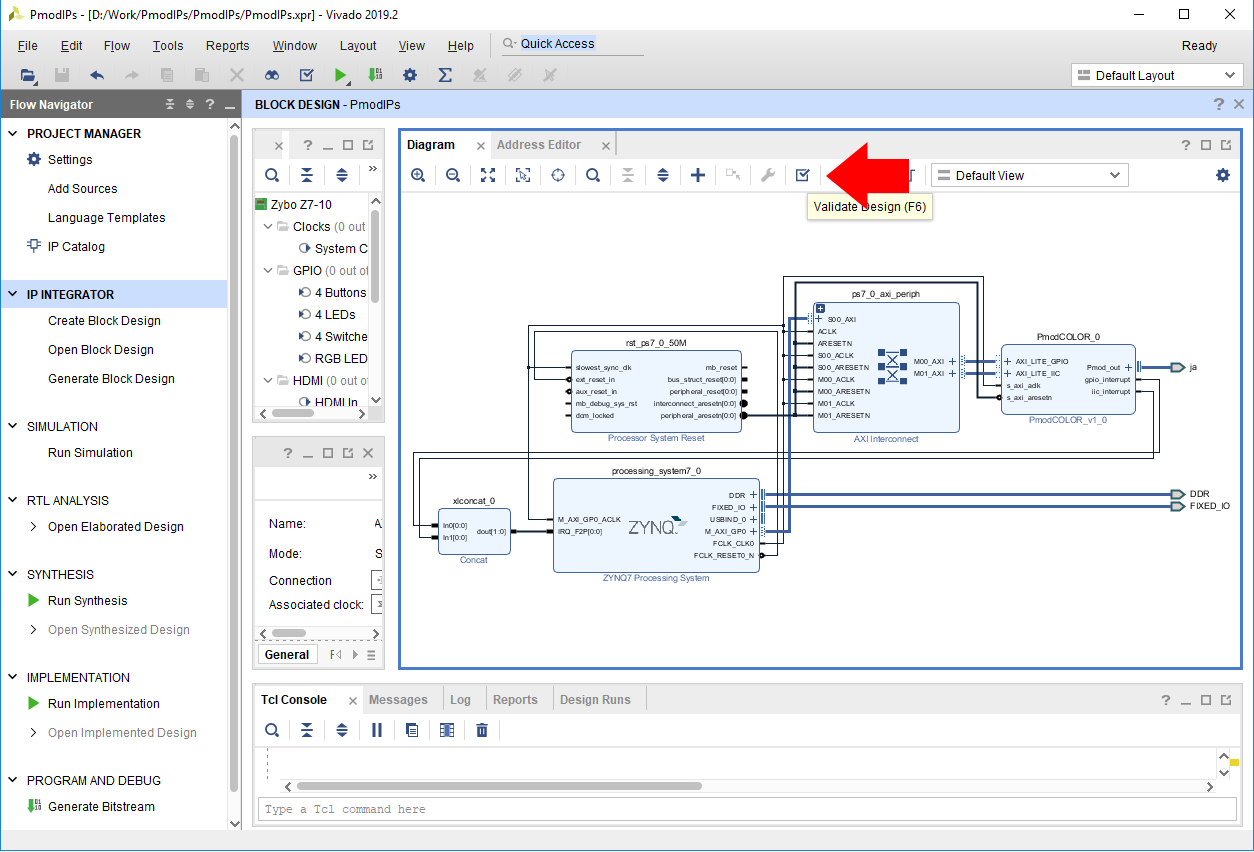
Before the Vivado project can be built, the block design must be validated. This step runs an automatic check of the block design to see if there are any potential issues with it. Click the Validate Design button (
 ) in the Diagram pane's toolbar (or press the F6 key).
) in the Diagram pane's toolbar (or press the F6 key).
If the design has issues, a dialog will pop up that lists them. It should be noted that most Warnings can be ignored, as can some Critical Warnings. These issues can also be viewed in the Messages tab of the pane at the bottom of the window.
If there are no issues, a dialog will pop up that will tell you so. Click OK to continue.
Note: Some Zynq boards may produce critical warnings at this stage relating to PCW_UIPARAM_DDR_DQS_TO_CLK_DELAY parameters. These warnings are ignorable and will not affect the functionality of the project. See the Hardware Errata section of your board's reference manual for more information.
- Build a Vivado Project
-
At this point, the Vivado Project is ready to be built, by running it through Synthesis and Implementation, and finally generating a bitstream. Click the Generate Bitstream button in the Program and Debug section of the Flow Navigator pane at the left side of the window.
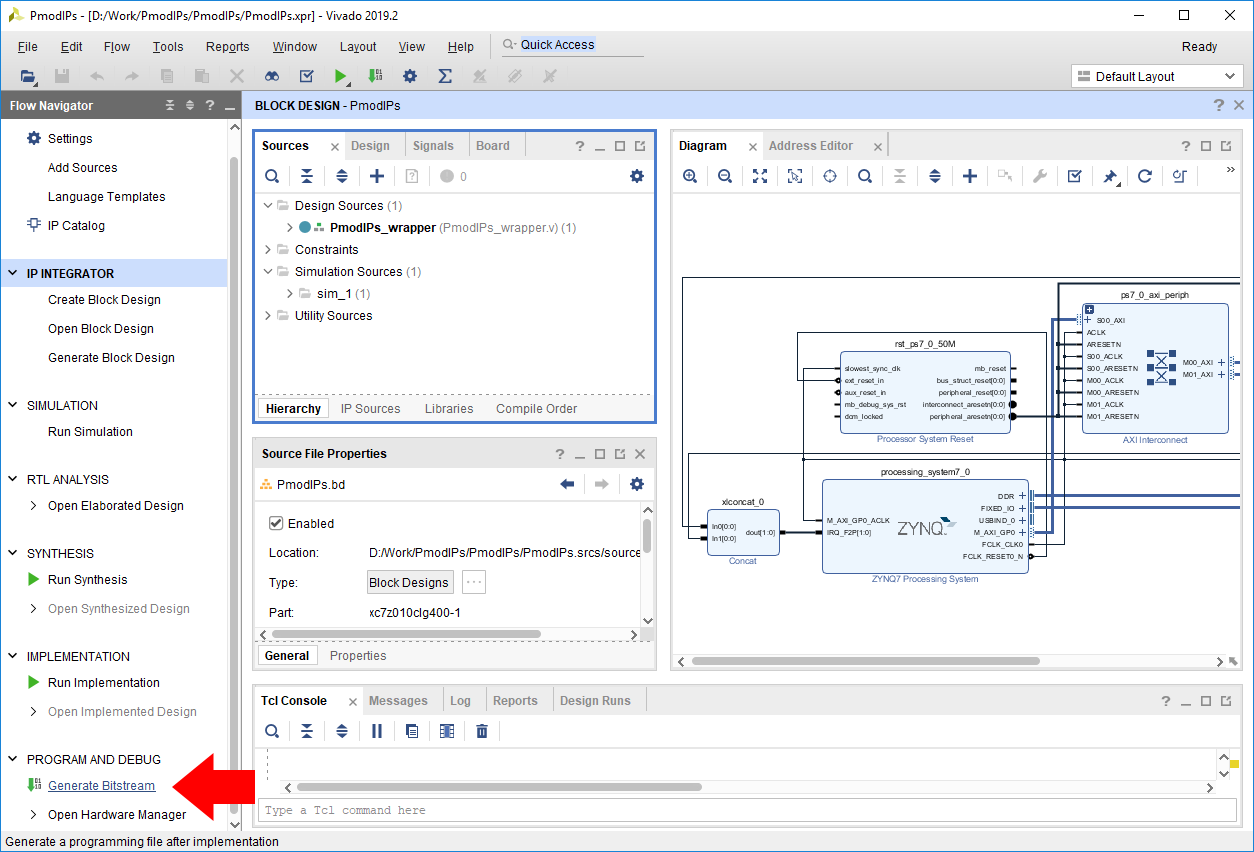
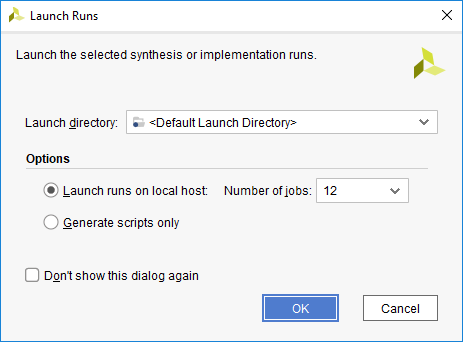
A dialog will pop up with several options for how Synthesis and Implementation should be run. Most should be left as defaults. Of particular importance is the Number of jobs dropdown, which is used to specify how much of the resources of your computer should be dedicated to the build. A larger number of jobs will dedicate more resources, which will allow the build to be completed faster. It is recommended to choose the highest available number.
Note: Critical warnings about how IPs included within another IP were packaged with a different board value can be safely ignored. The same is true for warnings related to negative CK-to-DQS delays seen on some Zynq boards.
Depending on the complexity of the design, the board used, and the strength of your computer, the process of building the project can take between 5 and 60 minutes.
When complete, a dialog will pop up that presents several options for what to do next:
- Open Implemented Design can be used to view the actual hardware design that has been implemented and will be placed onto the chip.
- View Reports can be used to view additional information about the design, including how much of the resources of the FPGA will be used by the design.
- Open Hardware Manager can be used to go directly to Vivado's Hardware Manager, which can be used to program a hardware design onto a board. This is typically used for designs that do not involve a software component.
- Generate Memory Configuration File can be used to create a file for programming an FPGA-only design into flash memory.
If none of these options are desired, click Cancel to continue.

- Export a Hardware Platform
-
Once the project has been built, the design must be exported from Vivado so that Vitis has access to information about the hardware that a software application is being developed for. This includes the set of IP connected to the processor, their drivers, their addresses, and more. Exporting hardware after the bitstream has been generated allows you to program your board directly from within Vitis.
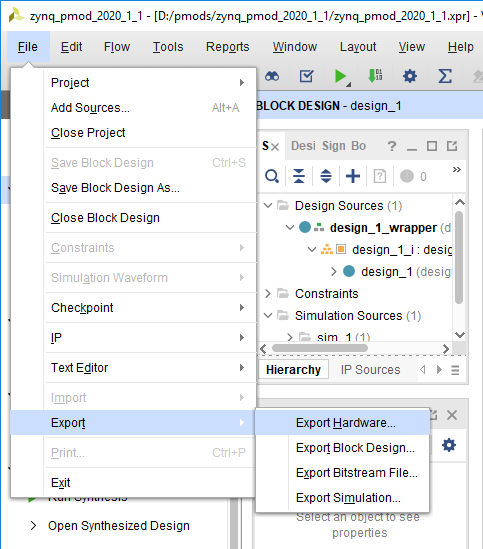
To export the hardware design, click Export → Export Hardware in the File menu.
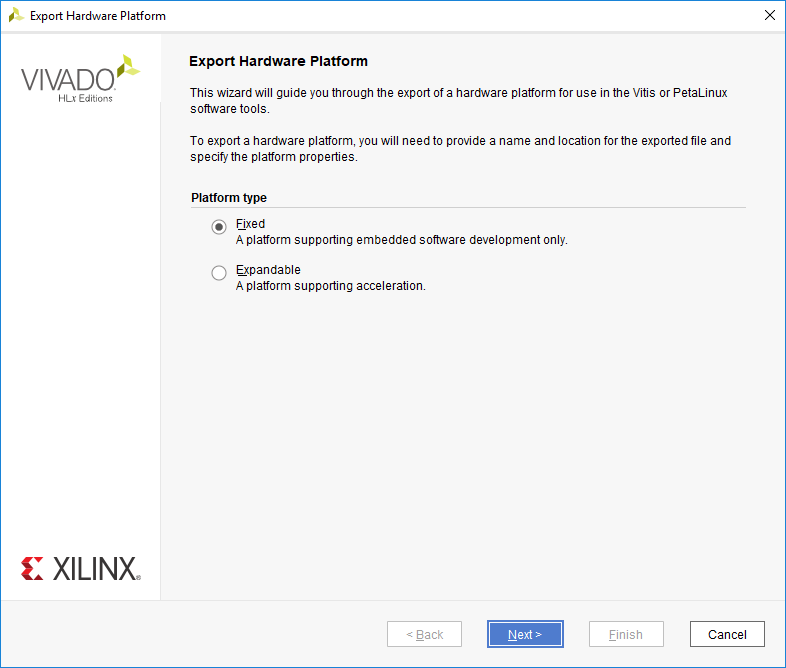
The wizard that pops up guides you through the options available for hardware export. The first screen allows you to select a Fixed or Expandable platform. In this case, choose a Fixed platform and click Next to continue.
This screen is not present in Vivado 2022.1, proceed to the next
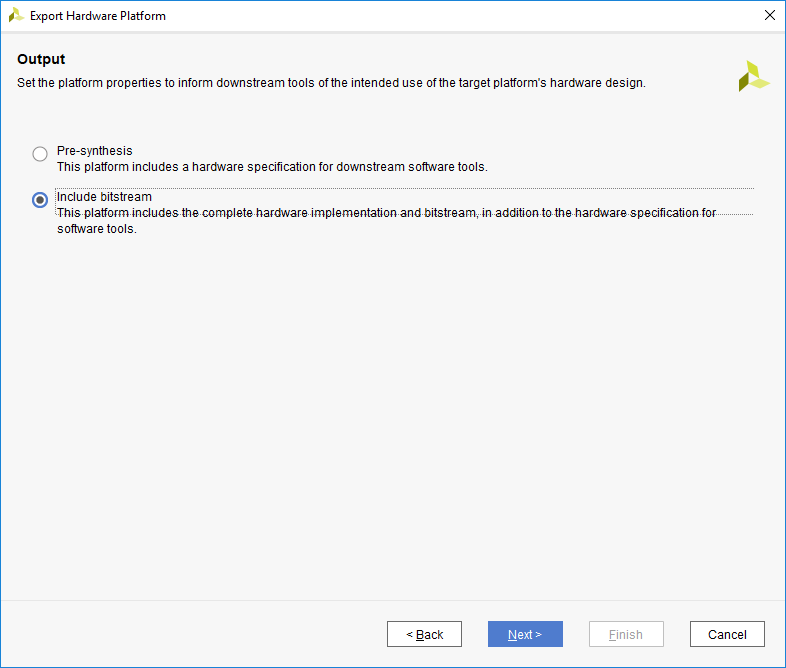
The Output screen allows you to select whether only the hardware specification (Pre-synthesis) should be exported, or whether the bitstream should be included. Since the bitstream has already been generated, it should be included in the platform so that Vitis can automatically figure out where it is when programming a board. Select Include bitstream and click Next to continue.
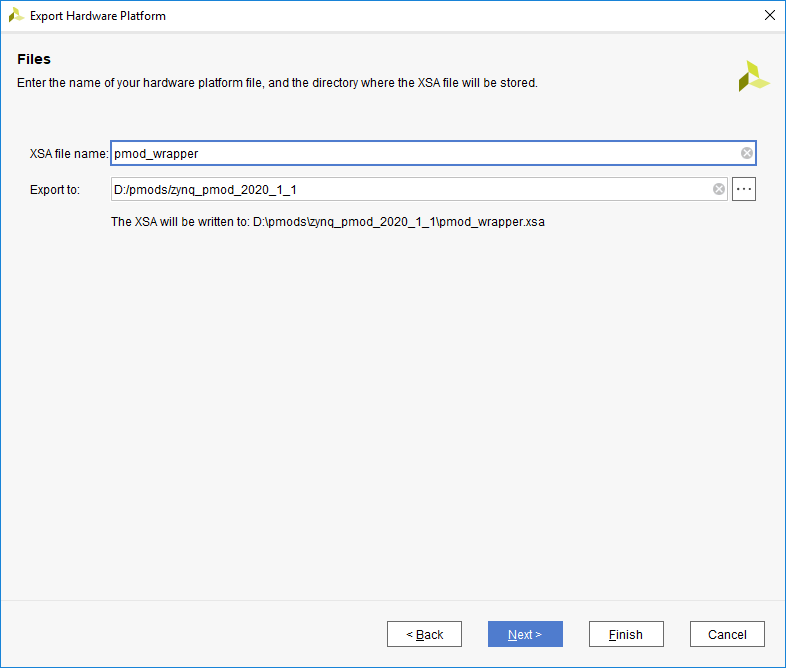
The Files screen gives you the option to choose a name for the Xilinx Shell Architecture (XSA) file, and provide a path to a folder that the file will be placed within. Give your XSA file a name, and choose a memorable location to place it in. This file will later be imported into Vitis, so take a note of where it is placed and what it is called.
Important: Do not use spaces in the file name or export path. Underscores or camelCase are recommended instead.
Click Next to continue.
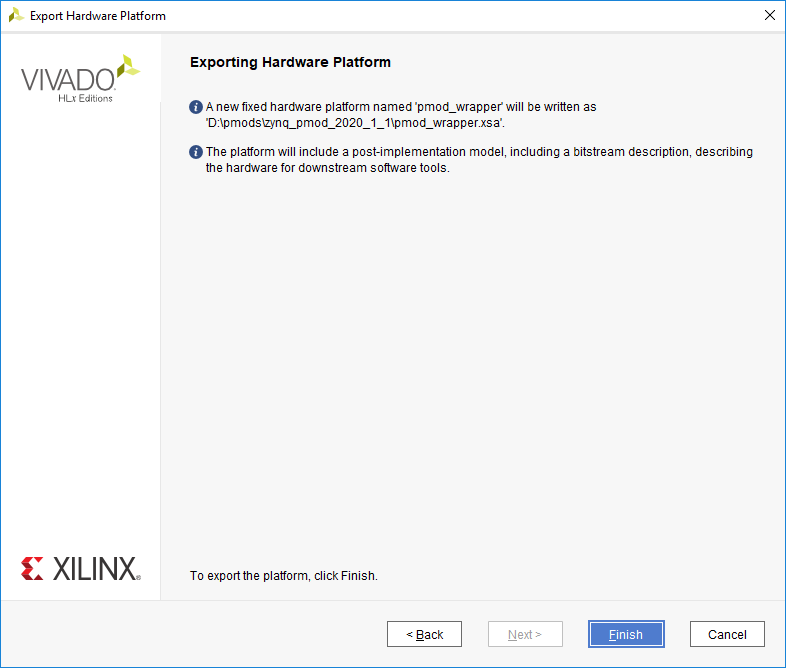
The final screen of the wizard summarizes the options you selected. Click Finish.
- Update a Hardware Platform in Vitis
-
If a hardware design is changed after having created a Vitis application project, several steps must be taken in order to update the Vitis workspace with a newly exported XSA file. The XSA file contains all of the information relevant to Vitis about the hardware platform, and changing a platform project's specification based on this file will automatically load in any changes. This includes adding new drivers for new IP that have been installed and changing the files that define the addresses and other details of any installed IP that may have been renamed or had their addresses changed.
These steps assume that you have already regenerated the bitstream and reexported hardware in the same way that would be done prior to creating a new Vitis workspace.
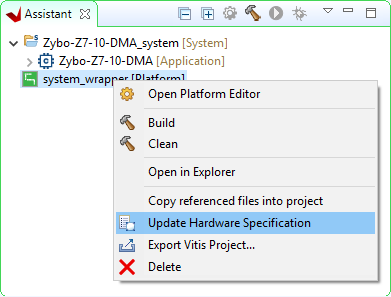
Within Vitis' Assistant pane, find the platform project that you wish to update with the new hardware. This project will typically have a name that ends with “_wrapper”, and is marked with the text “[Platform]”.
Right click on this project and select Update Hardware Specification.
In the dialog that pops up, click Browse, and navigate to the location of the XSA file that you want the platform to target. Click Open to select this file.

Double check that the Hardware Specification File path matches that of the XSA file you want to use, then click OK to start the automatic process of updating the platform.
When complete, a dialog will pop up to state that the platform project has been updated. Click OK to acknowledge this.
At this point, changes to the hardware specification have been loaded into the hardware platform. The bitstream will have been updated, if it was loaded into the XSA file. The set of drivers and the xparameters file will have changed to match what is in the modified design. Changes to the software application may be required before the application can be built and programmed onto the board, however, detailing what may need to be done is outside of the scope of this guide.


























Pcam 5C Image Sensor and Post Processing Options
- a: Change Resolution
- This option can be used to change the resolution of the video coming from the sensor. Currently 1080p@15Hz is not supported and will cause problems if used.
- b: Change Liquid Lens Focus
- This option is not compatible with this version of the Pcam 5C and should be ignored
- d: Change Image Format
- This option was included for debugging purposes and should always be set to RAW mode (option 2)
- e: Write a Register inside the Image Sensor
- This option allows you to write a value to any register inside the Image sensor over the OmniVision SCCB interface. You will need to refer to the OV5640 datasheet for information on the register map. This option is very useful for exploring the features of the image sensor.
- f: Read a Register inside the Image Sensor
- This option allows you to read the value of any register inside the Image sensor over the OmniVision SCCB interface.
- g: Change Gamma Correction Factor Value
- This option allows you to change the amount of gamma correction that is done by the custom AXI stream IP inside the FPGA.
- h: Change AWB Settings
- This option allows you to adjust how the image sensor is doing auto white balancing. There are 3 modes: Advanced, simple, and disabled. The advanced mode sometimes causes dramatic shifts between “red-ish” and “blue-ish” tints.
Pcam 5C Image Quality Notes
This demo uses our own software to configure the OV5640 image sensor and open source IP to post process the image data. Both of these facets of the software greatly affect image quality. This section documents the current quality of the images our software is able to produce with the Pcam 5C. We are aware that the quality of the image affects whether the Pcam 5C is suitable for some applications, so the information provided here can be used to help determine if the product will fit your needs.
We hope to improve the quality of the images produced by this demo over time, so please check back often if you are interested. We are also looking into using Xilinx IP and the Omnivision provided Linux drivers to provide another software option for the use of the Pcam 5C. This will be made available if successful on the Pcam 5C Resource Center.
Color Accuracy
We have seen some issues with the accuracy of the colors produced in some conditions. The affect is that colors seem less vivid and washed out. In some cases the image tends to look a little skewed towards “yellow-ish”. When the gamma adjustment is set higher, this affect becomes more noticeable. The images below compare the image produced with the Pcam 5C to images produced by a high-quality USB web camera. The camera used was a Logitech C920. The USB camera is on the right and the Pcam 5C image is on the left.


Over Exposure
Some situations that contain a mix of dark and bright areas will cause the brighter areas to look overexposed. Notice the very white area of the image produced by the Pcam 5C.

Visible Border Line
The top and left edges of the image have a single pixel gray line. This artifact is introduced by our post processing IP, axis_raw_demosaic. It is an accepted side-effect of the border interpolation algorithm used and we plan to provide other options in future versions of the IP. The image below is taken with the Pcam 5C lens cap on, which makes the gray line very visible on the all black image.

Additional Resources
All materials related to the use of the Zybo Z7 can be found on its Resource Center.
For a walkthrough of the process of creating a simple baremetal software project in Vivado and Vitis, see Getting Started with Vivado and Vitis for Baremetal Software Projects. Information on important parts of the GUIs, and indirect discussion of the steps required to modify, rebuild, and run this demo in hardware can also be found here.
For technical support, please visit the FPGA section of the Digilent Forum.