Pmod DHB1 Reference Manual
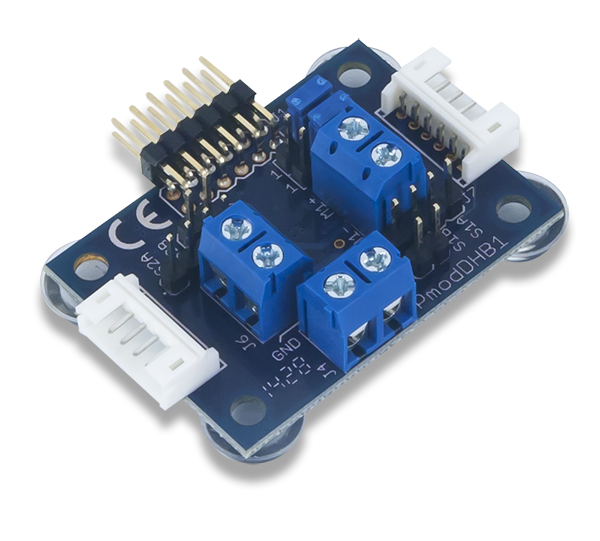
The Digilent Pmod DHB1 is a dual H-Bridge motor driver that is capable of driving two DC motors, a bipolar stepper motor, and other devices with inductive loads.
Download This Reference Manual
Features
- Dual H-Bridge capable of 1.5A RMS
- Two quadrature encoder channels for motor feedback
- Two JST 6-pin ports for connection to Digilent motor/gearbox
- Over-current protection
- Recommended 10.8 V max motor voltage
- Logic input voltage range of 2.5 V to 5 V
Functional Description
The Pmod DHB1 utilizes TI's DRV8833 to drive a variety of systems. With the two built in H-Bridges and pull down resistors on the inputs, users may run two DC motors or a single bipolar stepper motor in fast decay mode.
The DRV8833 chip provides over-current protection on the motor drive circuits. Each internal drive FET is independently monitored for an over-current condition and will be shut down internally to protect the chip. When an over-current condition is sensed the chip will shut down the FET with the fault and then set the NFAULT pin low signaling a fault condition on the chip. The remaining FETs will continue to operate as normal. When the fault condition is over, the chip will self-reset and return the NFAULT logic level to logic high.
Interfacing with the Pmod
The Pmod DHB1 communicates with the host board via the GPIO protocol. By driving the enable (EN) pins with a PWM signal and a logic level low or high voltage signal on the direction (DIR) pins, users are able to run DC motors at various speeds.
A truth table listing out the various possible combinations and results of the EN and DIR pins is provided below:
| DIR1 | EN1 | Result | DIR2 | EN2 | Result | |
|---|---|---|---|---|---|---|
| 0 | 0 | Stop | 0 | 0 | Stop | |
| 0 | 1/PWM | Forward | 0 | 1/PWM | Forward | |
| 1 | 0 | Stop | 1 | 0 | Stop | |
| 1 | 1/PWM | Reverse | 1 | 1/PWM | Reverse |
Note that like all H-Bridges, it is recommended that the EN pin is driven to a low voltage state before changing the voltage state on the DIR pin to ensure that the FETs are not short-circuited.
Two sensor feedback pins for both motors are provided so users can capture the signals coming from any Hall Effect Sensors in quadrature.
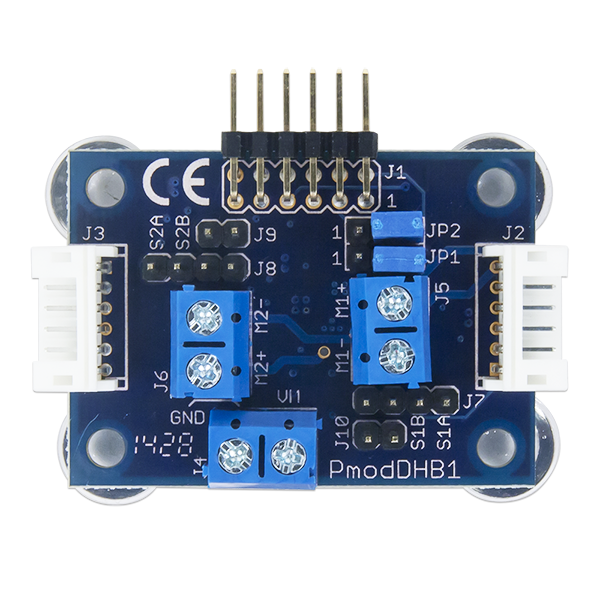
Pinout Description Tables
| Header J1 | ||||||
|---|---|---|---|---|---|---|
| Pin | Signal | Description | Pin | Signal | Description | |
| 1 | EN1 | Motor 1 Enable | 7 | EN2 | Motor 2 Enable | |
| 2 | DIR1 | Motor 1 Direction | 8 | DIR2 | Motor 2 Direction | |
| 3 | S1A | Motor 1 Sensor A Feedback | 9 | S2A | Motor 2 Sensor A Feedback | |
| 4 | S1B | Motor 1 Sensor B Feedback | 10 | S2B | Motor 2 Sensor B Feedback | |
| 5 | GND | Power Supply Ground | 11 | GND | Power Supply Ground | |
| 6 | VCC | Power Supply (3.3V/5V) | 12 | VCC | Power Supply (3.3V/5V) | |
| Header J4 - Motor Voltage | Header J2- M1 JST 6-Pin Motor Connector | |||||
|---|---|---|---|---|---|---|
| Pin | Signal | Description | Header J3- M2 JST 6-Pin Motor Connector | |||
| 1 | VM | Motor Power | Header J8- M2 Feedback | |||
| 2 | GND | Power Supply Ground | Pin | Signal | Description | |
| Header J5 - M1 Power | 1 | SA2-IN | Sensor A From Motor 2 | |||
| Pin | Signal | Description | 2 | SB2-IN | Sensor B From Motor 2 | |
| 1 | M1+ | Motor 1 Positive Supply | 3 | GND | Power Supply Ground | |
| 2 | M1- | Motor 1 Negative Supply | 4 | VCC | Power Supply (3.3V) | |
| Header J6- M2 Power | Header J9- Fault | |||||
| Pin | Signal | Description | Pin | Signal | Description | |
| 1 | M2+ | Motor 2 Positive Supply | 1 | NFAULT | Overcurrent Condition | |
| 2 | M2- | Motor 2 Negative Supply | 2 | GND | Power Supply Ground | |
| Header J7- M1 Feedback | Header J10- Sleep | |||||
| Pin | Signal | Description | Pin | Signal | Description | |
| 1 | SA1-IN | Sensor A From Motor 1 | 1 | NSLEEP | Puts device into sleep state | |
| 2 | SB1-IN | Sensor B From Motor 1 | 2 | GND | Power Supply Ground | |
| 3 | GND | Power Supply Ground | ||||
| 4 | VCC | Power Supply (3.3V) | ||||
Any external power applied to the Pmod DHB1 must be within 2.7V and 10.8V; however, it is recommended that Pmod is operated at 3.3V.
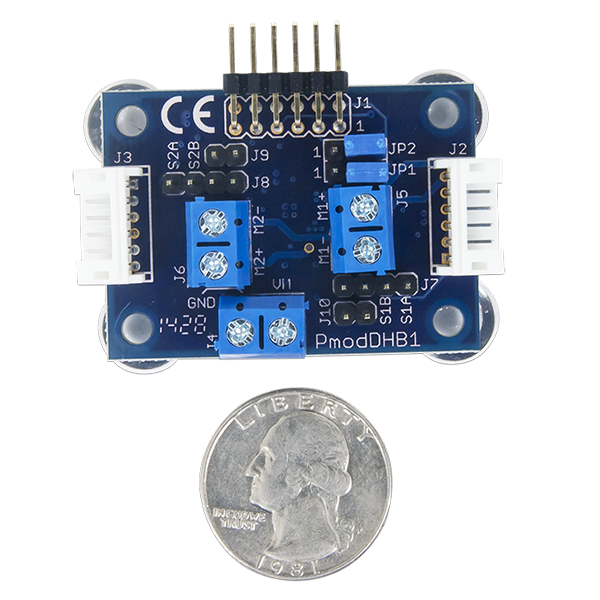
Physical Dimensions
The pins on the pin header are spaced 100 mil apart. The PCB is 1.3 inches long on the sides parallel to the pins on the pin header and 1.8 inches long on the sides perpendicular to the pin header.
Additional Information
The schematics of the Pmod DHB1 are available here. Additional information about the motor driver including specific timings of the chip can be found by checking out its datasheet here.
Example code demonstrating how to get information from the Pmod DHB1 can be found here.
If you have any questions or comments about the Pmod DHB1, feel free to post them under the appropriate section (“Add-on Boards”) of the Digilent Forum.